激光跟踪仪和SpatialAnalyzer在航空航天中的应用
确定组件(DA)是一种用于航空航天组件的技术,其需要钻孔精确且匹配的孔图案以用于紧固配合部件。DA技术对于有效地为航空航天构建大型结构至关重要,因为它允许一致,准确的装配和部件对齐。通常使用大型数控机床或大型夹具来实现钻孔DA孔图案所需的精度,但这些方法既昂贵又不灵活,无法改变设计和工艺。另一种技术是使用大型精密计量系统在轨道上使用机器人。该技术允许在能够适应设计和工艺变化的单元中精确钻孔DA孔图案。
该项目将激光跟踪仪与机器人集成在一起,以开发和解决机器人的运动学校准,并将激光跟踪仪测量结果整合为控制钻头位置和方向的反馈。该项目的目的是评估柔性机器人系统是否能够在航空航天公差范围内提供精确的DA孔模式。
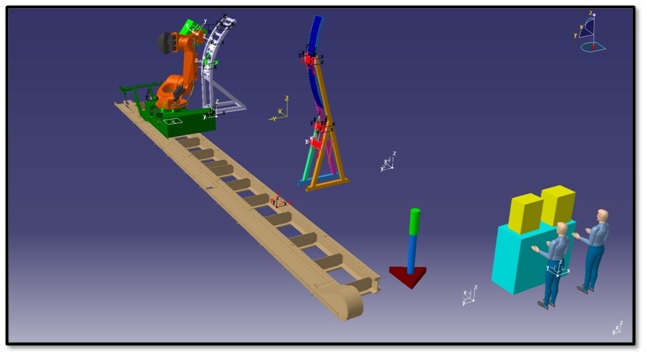
该项目使用了以下组件:Kuka KR-500,Leica AT901,Leica T-Mac 6D传感器,30'平移轨道,机身试验台和优惠券,以及用于直接机器人控制界面的SpatialAnalyzer(SA)机器,激光跟踪器界面和测量计划(MP)以自动化该过程。
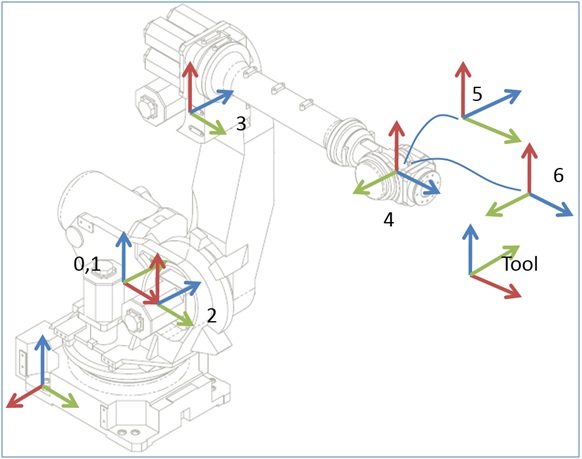
SA Machine用于集成并建立与机器人和激光跟踪器的实时连接。SA机器人驱动程序与Kuka控制器连接,提供直接通信以读取和命令联合值。该解决方案使用跟踪器测量和机器人关节角度值,当机器人通过DA孔图案内部和周围的一系列姿势移动时测量,并将这些测量值用作局部校准的输入。
校准使SA机器能够计算每个DA孔位置的最佳关节角度。SA机器通过直接命令最佳关节角度来绕过机器人的运动学,以实现DA孔精度。直接机器人界面使MP能够使用跟踪器测量来微调机器人在每个DA孔处的钻头位置。这种闭环反馈过程称为“移动测量- 纠正”。
将机器人发送到目标框架后,使用T-Mac测量机器人的实际位置。计算实际帧和目标帧之间的差异,并将其用作新增量机器人移动的输入。最终结果是精确定位机器人钻头以钻每个DA孔。
在项目结束时,结果表明SA机器能够将激光跟踪器与机器人一起使用,以提供灵活的确定孔钻孔单元解决方案。此外,还证明了以下两个步骤:首先,开发和解决机器人在局部工作区域的运动校准,其次,将激光跟踪器测量结果整合为控制钻头位置和方向的反馈。
这项技术的优点包括:
-在感兴趣的工作空间内进行局部校准优化
-运动校准包括基于负载的偏转补偿和钻出每个局部孔图案所需的姿势
-能够挑选和选择要优化的运动参数
-允许选择最佳的计量系统来校准工作单元内的机器人
-实现了DA孔图案的精度和所需公差的显着改善。相对于使用机器人运动学的净差异使用SA运动学大约好14倍,使用移动,测量,正确技术大约好40倍。


扫描二维码,关注顶柱科技!


